
Inter-Processor Communication for Ford ADAS Platform
Led the development of high-speed communication between dual high-performance processors on Ford’s first ADAS platform for the F-150 — the best-selling vehicle in the U.S.
Project Overview
This project focused on enabling seamless, real-time data exchange between compute nodes in Ford’s next-generation Advanced Driver-Assistance System (ADAS) architecture.
Two independent ECUs — running QNX and AUTOSAR — needed deterministic, fault-tolerant communication to coordinate sensor fusion, perception, and control logic.
I led the design and validation of the inter-processor communication (IPC) framework, which formed the backbone of the platform’s real-time feature processing pipeline.
This work was instrumental in achieving production-grade reliability and meeting strict latency requirements across heterogeneous OS environments.
Key Details / Outcomes
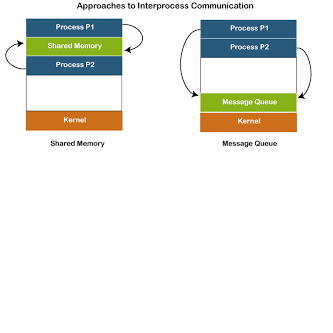
Cross-Platform IPC Framework: Implemented message-based communication between QNX and AUTOSAR processors for deterministic data flow.
Low-Latency Performance: Achieved sub-millisecond round-trip transfer times critical for sensor fusion workloads.
Production-Critical Integration: Recognized internally as a key enabler for Ford’s first ADAS launch on the F-150.
Scalable Architecture: Designed interfaces allowing easy expansion to additional processors and vehicle variants.
Challenges & Learnings
- Managing synchronization between two real-time OS environments with different scheduling and memory models.
- Debugging timing drift and queue contention issues under high message throughput.
- Designing robust error-recovery mechanisms to handle transient link failures without system resets.
- Collaborating across hardware, AUTOSAR stack, and system-integration teams under strict launch timelines.
Building multi-processor embedded systems or real-time communication frameworks?