
Sensor Fusion Integration on Embedded ADAS Platform
Contributed to the development and integration of Camera + Radar sensor fusion using the ROS ecosystem, enabling real-time perception capabilities on resource-constrained automotive hardware.
Project Overview
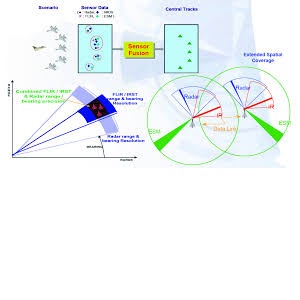
This project involved integrating a multi-sensor fusion pipeline—combining camera and radar inputs—into Ford’s embedded ADAS computing platform.
While the core fusion algorithms were developed by perception specialists, my role focused on embedding the system into production hardware, ensuring reliable performance within tight compute and memory budgets.
I worked across both in-vehicle and simulated environments, designing GUIs and standardized testing workflows to accelerate validation and debugging. The work ensured that sensor fusion outputs were consistent, deterministic, and compatible with the downstream feature stack.
Key Details / Outcomes
Real-Time Integration: Successfully deployed camera–radar fusion stack on embedded SoC within defined real-time latency requirements.
Workflow Standardization: Built ROS-based simulation and in-vehicle testing framework for automated regression validation.
Debugging Infrastructure: Created visualization and diagnostic GUIs for rapid validation of sensor alignment and message flow.
Production Readiness: Delivered stable, production-grade integration supporting perception features in driver-assistance systems.
Challenges & Learnings
- Adapting complex ROS-based algorithms to limited CPU/GPU embedded targets without degrading performance.
- Managing multi-sensor timing synchronization and message throughput in resource-constrained environments.
- Bridging development workflows between algorithm research (Python/ROS) and production C++ integration layers.
- Building efficient debug tools that reduced on-vehicle validation time by over 50%.
Working on sensor fusion or perception system integration for embedded platforms?